SSR1 / SR6 Motion Platform
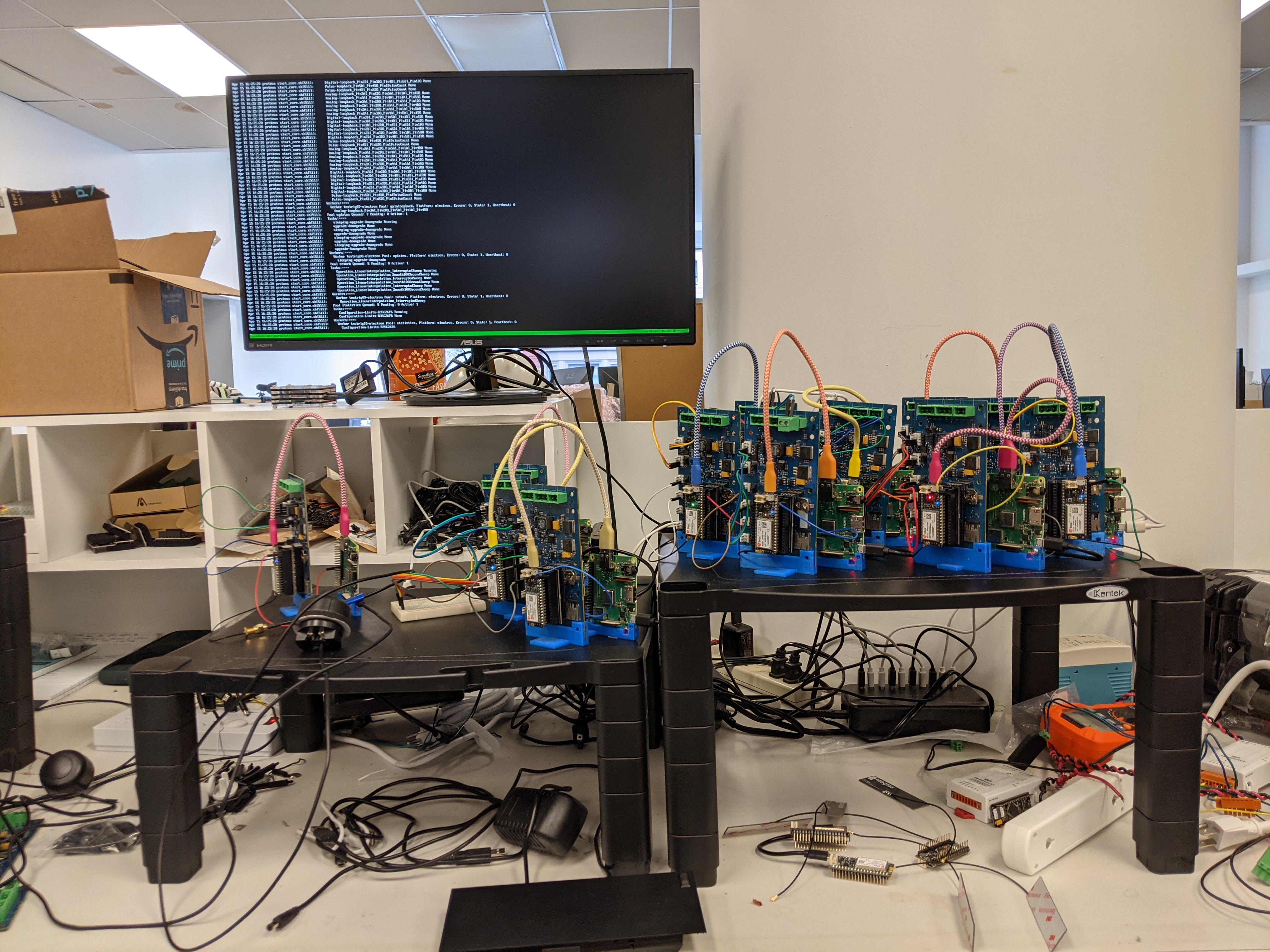
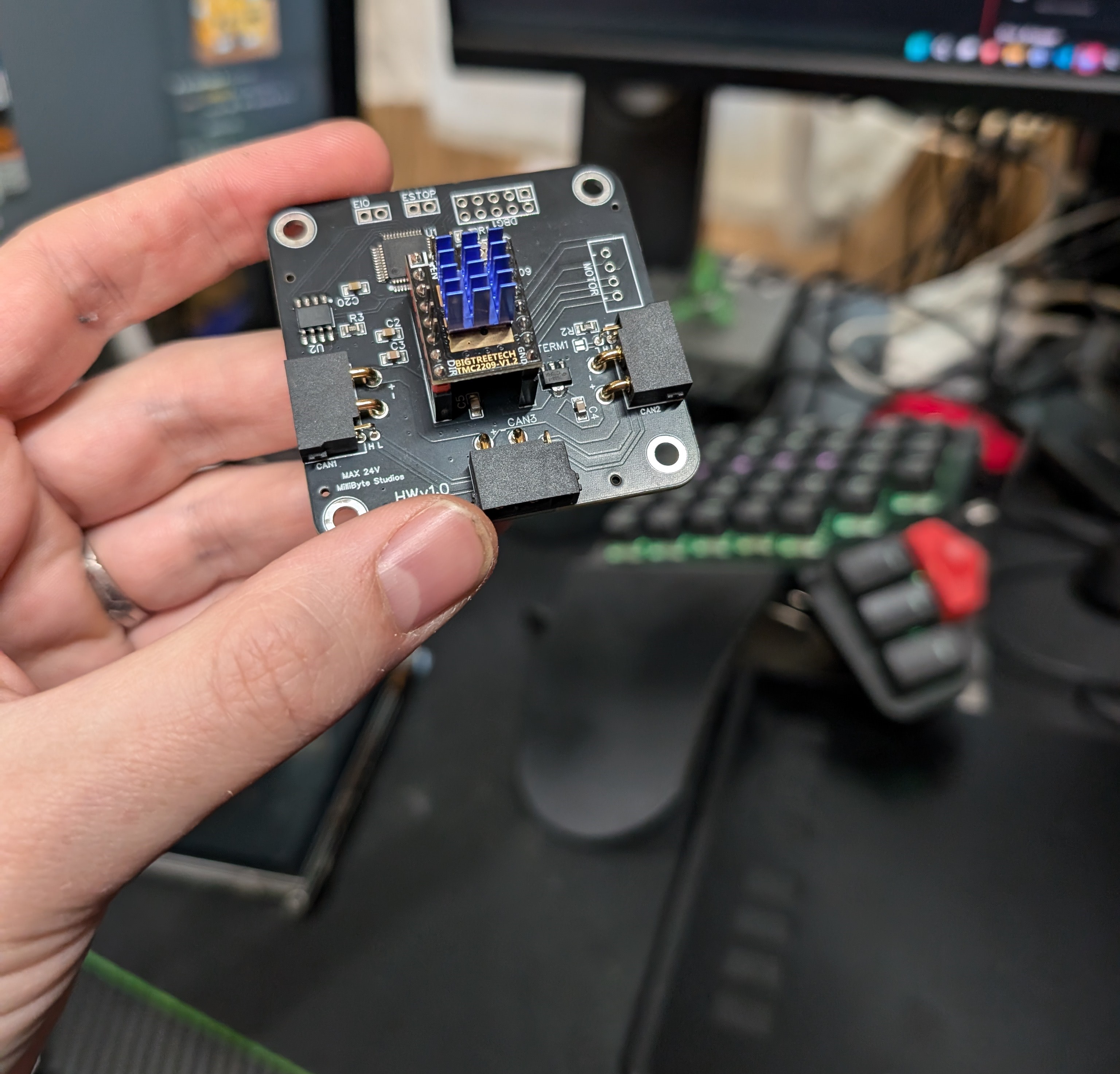
millibyte-productsThe SSR and SR6 boards are a family of multi-axis, closed-loop motion-control platforms built around the ESP32. The goal: replace stacks of expensive, low-feature commercial controllers with a single, compact, fully open-hardware board that can drive multiple actuators with precise position feedback.
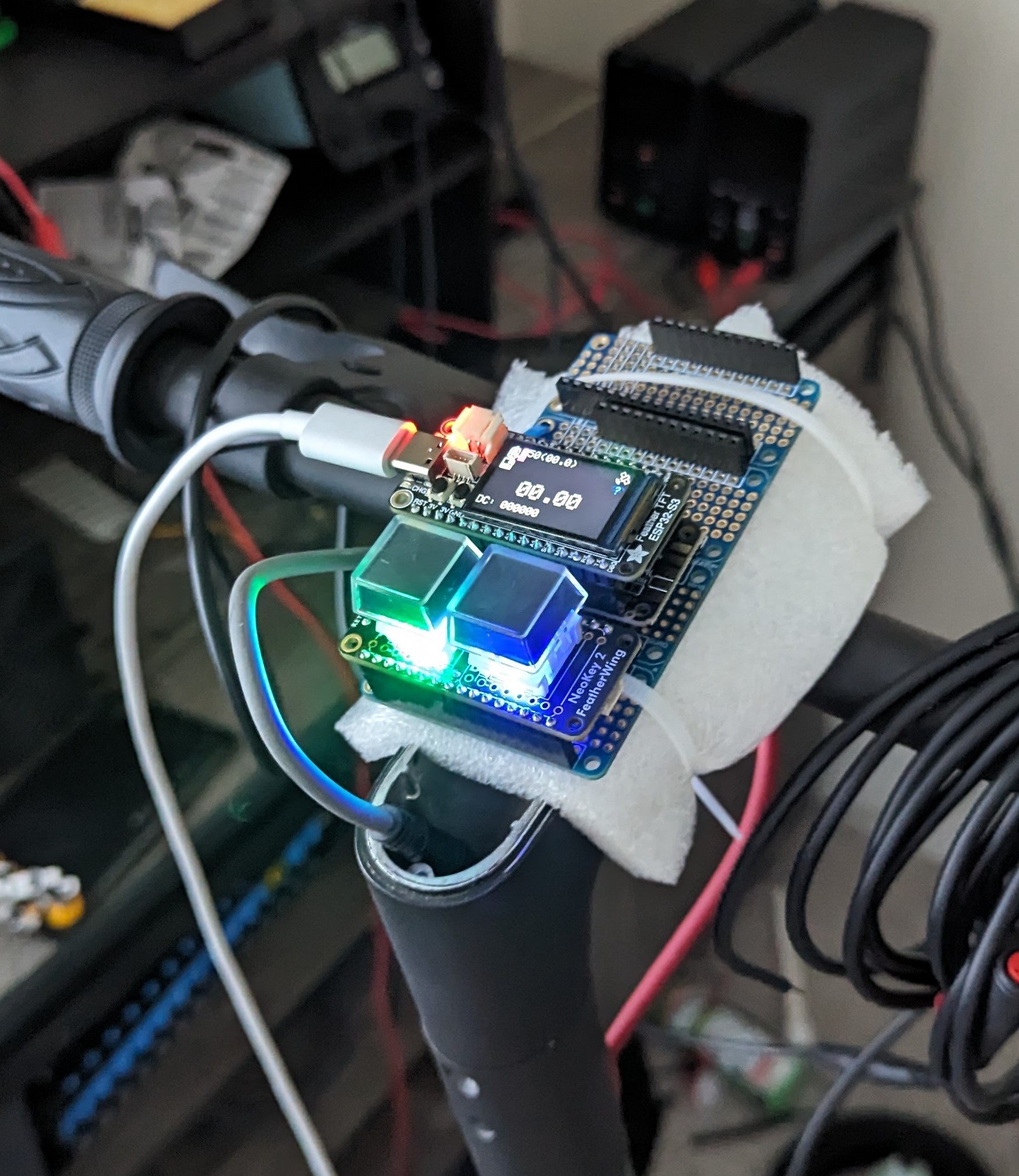
The SR6PD variant adds on-board USB-C Power Delivery, negotiating higher voltages directly from a PD source so the board can run high-power motion without a separate brick or bench supply. The result is a clean, cable-light setup that's easy to integrate into a larger machine.
Why it exists
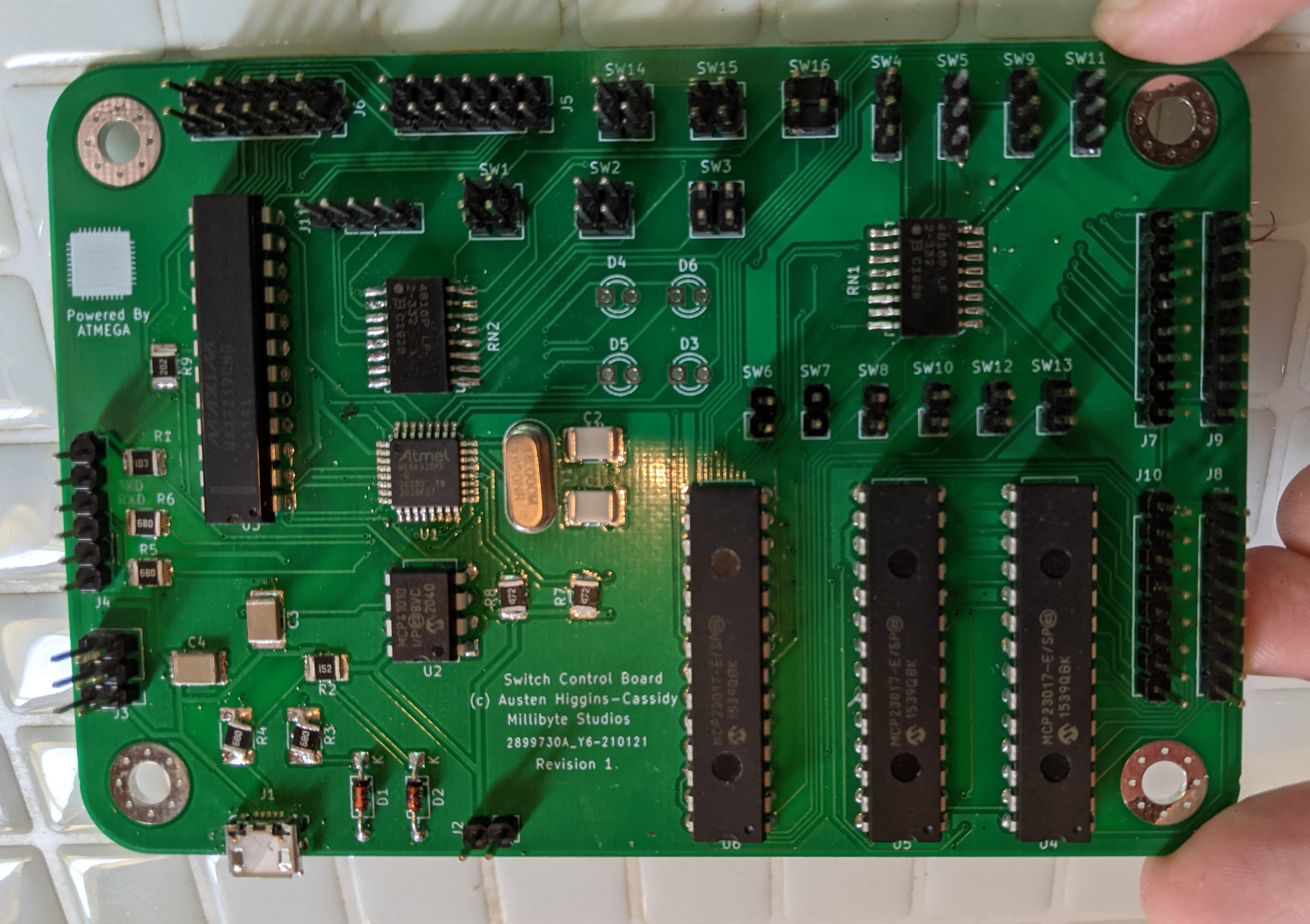
Off-the-shelf multi-servo controllers tend to be costly, closed, and feature-poor. By publishing the schematics, BOM, and firmware, anyone can fabricate, modify, and extend the hardware — and the ESP32 brings Wi-Fi, Bluetooth, and plenty of headroom for control loops and networking.
Engineering highlights
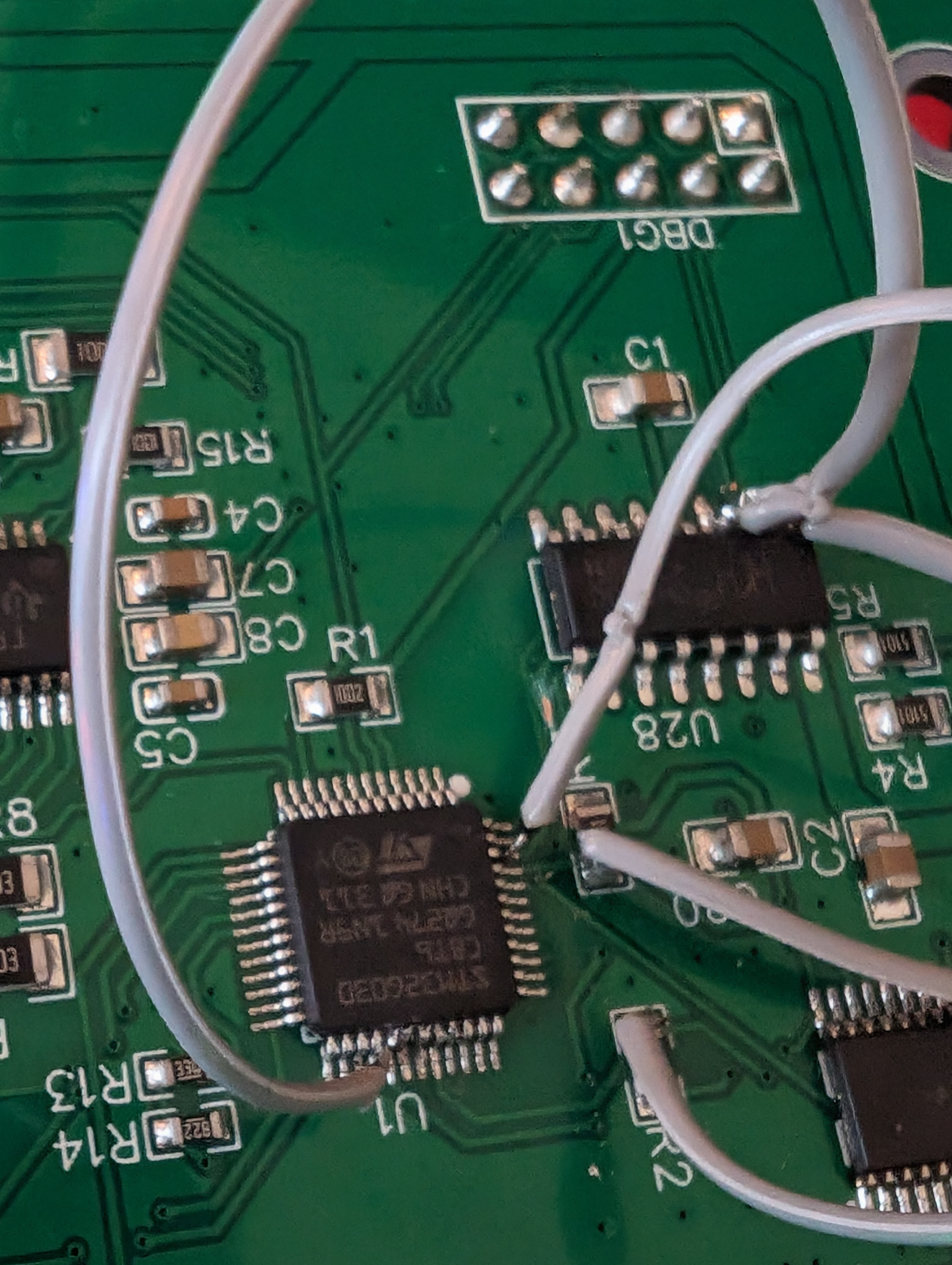
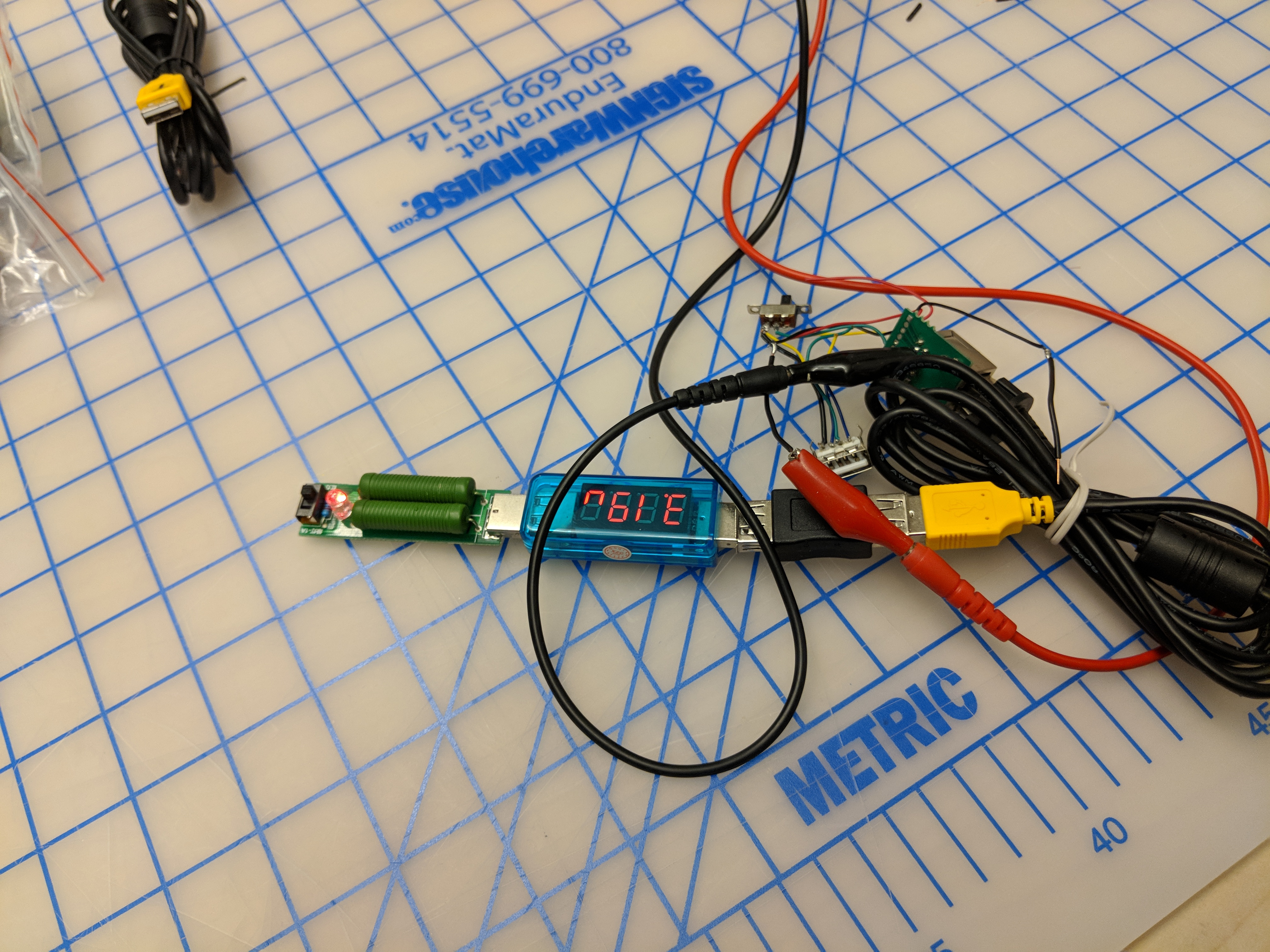
Tight integration of power delivery, motor drive, and feedback on a small board means careful attention to power-plane layout, thermals, and load testing — validated on the bench before firmware ever ran.